About Me
I am working on Robot Policy Learning and Geometric Learning at The Helping Hands Lab in Northeastern University, advised by Professor Robert Platt and PhD Candidate Haojie Huang. Previously, I conducted research on multiple robotic and computer vision topics: Deep Learning Optimization for 3D Vision, FDM Printing for Soft Robotics, and Healthcare Automated Monitoring System. My past research works are supervised by Prof. Ziming Zhang at VISLab@WPI, Prof. Markus P. Nemitz at Nemitz Robotics Group, and Prof. Christopher Nycz at AIM Lab. CV: Link. Contact: seanliu0272 [At] gmail [Dot] com
News
- June 30, 2024: Our paper, “Loss Distillation via Gradient Matching for Point Cloud Completion with Weighted Chamfer Distance,” has been accepted for an Oral Presentation at IEEE/RSJ IROS 2024.
- January 31, 2024: Our paper, “Vision-based FDM Printing for Fabricating Airtight Soft Actuators,” has been accepted for an Oral Presentation at IEEE RoboSoft 2024.
Research Vision
My long-term research goal is to build automation systems that can adapt reliably to new environments through trustworthy perception and learned motion strategies grounded in structured reasoning. These systems will assist humans in accomplishing challenging tasks in the physical world.
Selected Publications
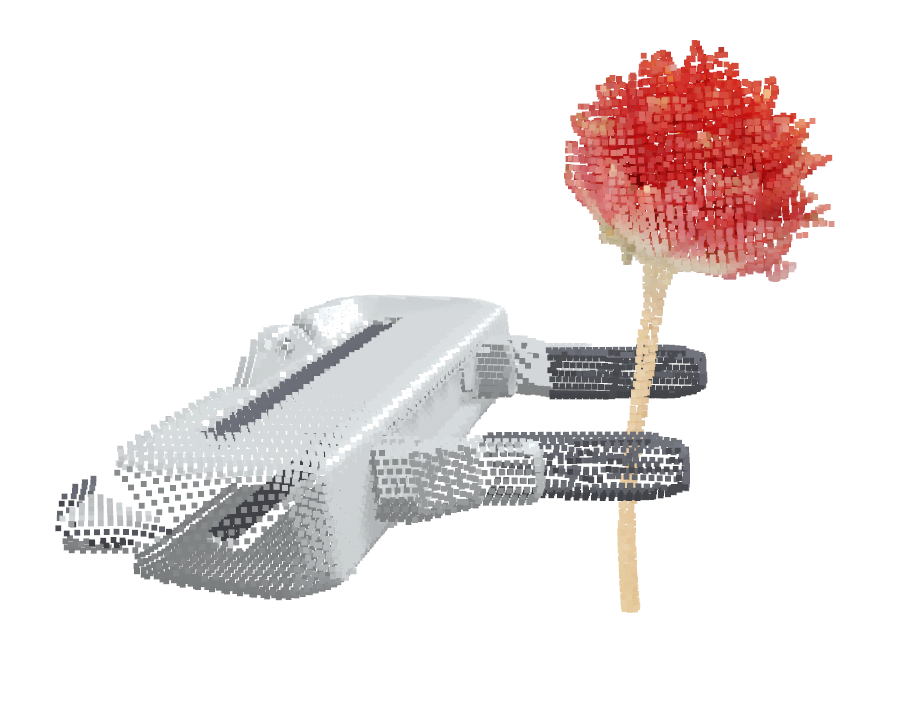
MATCH POLICY: A Simple Pipeline from Point Cloud Registration to Manipulation Policies
Haojie Huang, Haotian Liu, Dian Wang, Robin Walters*, and Robert Platt* (* Equal Advising)
IEEE International Conference on Robotics and Automation ICRA 2025 at Atlanta USA, PDF, Project Page
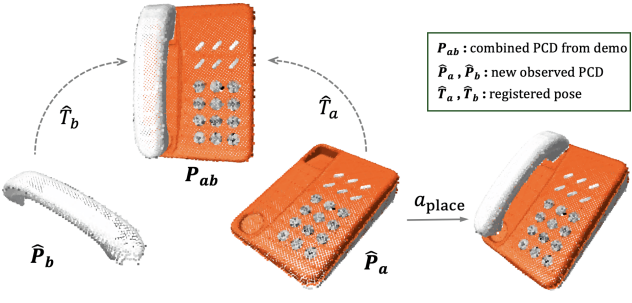
IMAGINATION POLICY: Using Generative Point Cloud Models for Learning Manipulation Policies
Haojie Huang, Karl Schmeckpeper*, Dian Wang*, Ondrej Biza*, Yaoyao Qian**, Haotian Liu**, Mingxi Jia**, Robert Platt, and Robin Walters (*, ** Equal Contribution)
Conference on Robot Learning CoRL 2024 at Munich, Germany, PDF, Project Page
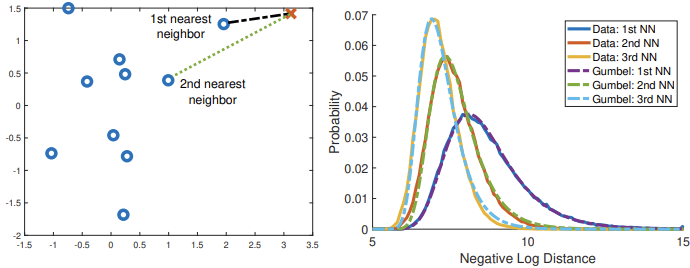
GPS: A Probabilistic Distributional Similarity with Gumbel Priors for Set-to-Set Matching
Haotian Liu*, Fangzhou Lin*, Ziming Zhang*, Jose Morales, Haichong Zhang, Kazunori Yamada, Vijaya B Kolachalama, Venkatesh Saligrama (* co-first author)
International Conference on Learning Representations ICLR 2025 at Singapore, PDF, Code
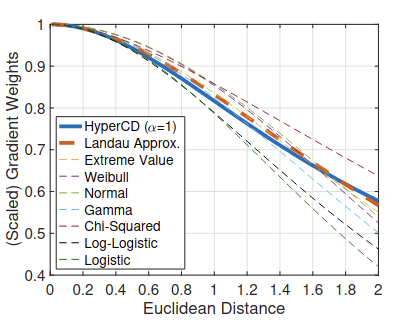
Loss Distillation via Gradient Matching for Point Cloud Completion with Weighted Chamfer Distance
Haotian Liu*, Fangzhou Lin*, Haoying Zhou*, Songlin Hou*, Kazunori Yamada, Gregory S. Fischer, Yanhua Li, Haichong K. Zhang, and Ziming Zhang (* co-first author)
IEEE/RSJ International Conference on Intelligent Robots and Systems IROS 2024 at Abu Dhabi UAE, Oral Presentation, PDF, Code, PPT
Automated Control of External Ventricular Drain for Neuro-ICU
Haotian Liu, Yujie Guo, Haoran Zhang, and Matthew Duncan

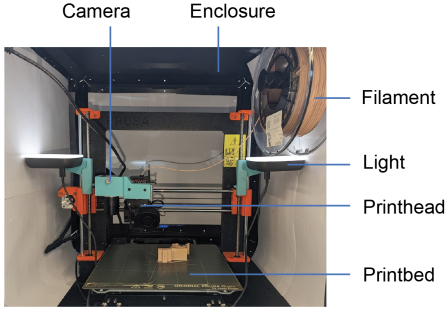
Vision-based FDM Printing for Fabricating Airtight Soft Actuators
Yijia Wu*, Zilin Dai*, Haotian Liu, Lehong Wang, and Markus P. Nemitz (* co-first author)
IEEE-RAS International Conference on Soft Robotics RoboSoft 2024 at San Diego USA, Oral Presentation PDF
Services
Reviewer of: NeurIPS, ICLR, AISTATS, ICML